ປະເພດຂອງປ່ຽງຄວບຄຸມທິດທາງໄຮໂດຼລິກ
2024-03-22ປ່ຽງຄວບຄຸມໄຮໂດຼລິກຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມຄວາມກົດດັນ, ການໄຫຼແລະທິດທາງການໄຫຼຂອງນ້ໍາມັນໃນລະບົບໄຮໂດຼລິກເພື່ອໃຫ້ thrust, ຄວາມໄວແລະທິດທາງການເຄື່ອນໄຫວຂອງ actuator ຕອບສະຫນອງຄວາມຕ້ອງການ. ອີງຕາມຫນ້າທີ່ຂອງພວກເຂົາ, ປ່ຽງຄວບຄຸມລະບົບໄຮໂດຼລິກແບ່ງອອກເປັນສາມປະເພດ: ປ່ຽງທິດທາງ, ປ່ຽງຄວາມກົດດັນແລະປ່ຽງການໄຫຼ.
ປ່ຽງຄວບຄຸມທິດທາງ
ປ່ຽງທິດທາງແມ່ນວາວທີ່ໃຊ້ເພື່ອຄວບຄຸມທິດທາງຂອງການໄຫຼຂອງນ້ໍາມັນ. ມັນແບ່ງອອກເປັນວາວທາງດຽວແລະປ່ຽງປີ້ນຕາມປະເພດ.
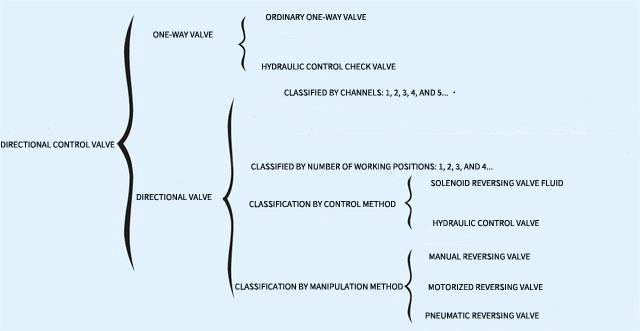
ປະເພດຂອງປ່ຽງຄວບຄຸມທິດທາງມີດັ່ງນີ້:
(1) ປ່ຽງທາງດຽວ (ເຊັກປ່ຽງ)
ປ່ຽງທາງດຽວແມ່ນວາວທິດທາງທີ່ຄວບຄຸມການໄຫຼຂອງນ້ໍາມັນໃນທິດທາງດຽວແລະບໍ່ອະນຸຍາດໃຫ້ໄຫຼຍ້ອນກັບ. ມັນຖືກແບ່ງອອກເປັນປະເພດບານວາວແລະປະເພດປ່ຽງ poppet ຕາມໂຄງສ້າງຫຼັກຂອງວາວ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 8-17.
ຮູບທີ 8-18(b) ສະແດງໃຫ້ເຫັນປ່ຽງກວດ poppet. ສະພາບເດີມຂອງປ່ຽງແມ່ນວ່າແກນວາວຖືກກົດເບົາໆໃສ່ບ່ອນນັ່ງປ່ຽງພາຍໃຕ້ການປະຕິບັດຂອງພາກຮຽນ spring. ໃນລະຫວ່າງການປະຕິບັດງານ, ເມື່ອຄວາມກົດດັນຂອງນ້ໍາ inlet P ເພີ່ມຂຶ້ນ, ມັນເອົາຊະນະຄວາມກົດດັນຂອງພາກຮຽນ spring ແລະຍົກແກນວາວ, ເຮັດໃຫ້ປ່ຽງເປີດແລະເຊື່ອມຕໍ່ວົງຈອນນ້ໍາມັນ, ດັ່ງນັ້ນນ້ໍາມັນໄຫຼອອກຈາກທໍ່ນ້ໍາມັນແລະໄຫຼອອກຈາກທໍ່ນ້ໍາມັນ. ປ້ຳນ້ຳມັນ. ໃນທາງກົງກັນຂ້າມ, ເມື່ອຄວາມດັນນ້ຳມັນຢູ່ປ້ຳນ້ຳມັນສູງກວ່າຄວາມດັນນ້ຳມັນທີ່ປ້ຳນ້ຳມັນ, ແຮງດັນຂອງນ້ຳມັນຈະກົດຫຼັກປ່ຽງໃຫ້ແໜ້ນກັບປ່ຽງປ່ຽງ, ກີດຂວາງທາງຜ່ານຂອງນ້ຳມັນ. ຫນ້າທີ່ຂອງພາກຮຽນ spring ແມ່ນເພື່ອຊ່ວຍໃຫ້ນ້ໍາ backflow ບົບໄຮໂດຼລິກ tighten ພອດວາວໃນເວລາທີ່ປ່ຽງໄດ້ຖືກປິດເພື່ອສ້າງຄວາມເຂັ້ມແຂງປະທັບຕາ.
(2) ປ່ຽງທິດທາງ
ປ່ຽງປີ້ນກັບຖືກນໍາໃຊ້ເພື່ອປ່ຽນເສັ້ນທາງການໄຫຼຂອງນ້ໍາມັນເພື່ອປ່ຽນທິດທາງການເຄື່ອນໄຫວຂອງກົນໄກການເຮັດວຽກ. ມັນໃຊ້ແກນວາວເພື່ອເຄື່ອນຍ້າຍທີ່ກ່ຽວຂ້ອງກັບຮ່າງກາຍປ່ຽງເພື່ອເປີດຫຼືປິດວົງຈອນນ້ໍາມັນທີ່ສອດຄ້ອງກັນ, ດັ່ງນັ້ນການປ່ຽນສະພາບການເຮັດວຽກຂອງລະບົບໄຮໂດຼລິກ. ເມື່ອແກນວາວແລະຮ່າງກາຍຂອງວາວຢູ່ໃນຕໍາແຫນ່ງທີ່ກ່ຽວຂ້ອງທີ່ສະແດງຢູ່ໃນຮູບ 8-19, ສອງຫ້ອງຂອງກະບອກໄຮໂດຼລິກໄດ້ຖືກສະກັດຈາກນ້ໍາມັນຄວາມກົດດັນແລະຢູ່ໃນສະພາບປິດ. ຖ້າຜົນບັງຄັບໃຊ້ຈາກຂວາໄປຊ້າຍຖືກໃຊ້ກັບແກນວາວເພື່ອຍ້າຍມັນໄປທາງຊ້າຍ, ປອດນ້ໍາມັນ P ແລະ A ໃນຮ່າງກາຍຂອງປ່ຽງແມ່ນເຊື່ອມຕໍ່, ແລະ B ແລະ T ແມ່ນເຊື່ອມຕໍ່. ນ້ໍາມັນຄວາມກົດດັນເຂົ້າໄປໃນຫ້ອງຊ້າຍຂອງກະບອກບົບໄຮໂດຼລິກໂດຍຜ່ານ P ແລະ A, ແລະ piston ຍ້າຍໄປທາງຂວາ; ນ້ໍາມັນຢູ່ໃນຝາປິດກັບຖັງນ້ໍາມັນຜ່ານ B ແລະ T.
ໃນທາງກົງກັນຂ້າມ, ຖ້າມີຜົນບັງຄັບໃຊ້ຈາກຊ້າຍໄປຂວາໃສ່ແກນວາວເພື່ອຍ້າຍມັນໄປທາງຂວາ, ຫຼັງຈາກນັ້ນ P ແລະ B ແມ່ນເຊື່ອມຕໍ່, A ແລະ T ແມ່ນເຊື່ອມຕໍ່, ແລະ piston ຍ້າຍໄປທາງຊ້າຍ.
ອີງຕາມຮູບແບບການເຄື່ອນໄຫວທີ່ແຕກຕ່າງກັນຂອງແກນວາວ, ປ່ຽງປີ້ນກັບກັນສາມາດແບ່ງອອກເປັນສອງປະເພດ: ປະເພດວາວເລື່ອນແລະປະເພດວາວຫມຸນ. ໃນບັນດາພວກເຂົາ, ປ່ຽງເລື່ອນປະເພດວາວປີ້ນກັບກັນແມ່ນຖືກນໍາໃຊ້ທົ່ວໄປຫຼາຍ. ປ່ຽງເລື່ອນໄດ້ຖືກແບ່ງອອກຕາມຈໍານວນຕໍາແຫນ່ງການເຮັດວຽກຂອງແກນວາວຢູ່ໃນຮ່າງກາຍປ່ຽງແລະ passage ພອດນ້ໍາມັນທີ່ຄວບຄຸມໂດຍປ່ຽງປີ້ນກັບກັນ. ປ່ຽງປີ້ນມີສອງຕໍາແຫນ່ງສອງທາງ, ສອງຕໍາແຫນ່ງສາມທາງ, ສອງຕໍາແຫນ່ງສີ່ທາງ, ສອງຕໍາແຫນ່ງຫ້າທາງແລະປະເພດອື່ນໆ. , ເບິ່ງຕາຕະລາງ 8-4. ຈໍານວນຂອງຕໍາແຫນ່ງແລະຜ່ານທີ່ແຕກຕ່າງກັນແມ່ນເກີດມາຈາກການປະສົມທີ່ແຕກຕ່າງກັນຂອງຮ່ອງ undercut ກ່ຽວກັບຮ່າງກາຍປ່ຽງແລະ shoulders ສຸດຫຼັກວາວ.
ອີງຕາມວິທີການຄວບຄຸມ spool, ປ່ຽງທິດທາງປະກອບມີປະເພດຄູ່ມື, ເຄື່ອງຈັກ, ໄຟຟ້າ, ໄຮໂດຼລິກແລະໄຟຟ້າ.
ປ່ຽງຄວາມກົດດັນ
ປ່ຽງຄວາມກົດດັນຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມຄວາມກົດດັນຂອງລະບົບໄຮໂດຼລິກ, ຫຼືນໍາໃຊ້ການປ່ຽນແປງຄວາມກົດດັນໃນລະບົບເພື່ອຄວບຄຸມການປະຕິບັດຂອງອົງປະກອບໄຮໂດຼລິກທີ່ແນ່ນອນ. ອີງຕາມການນໍາໃຊ້ທີ່ແຕກຕ່າງກັນ, ປ່ຽງຄວາມກົດດັນໄດ້ຖືກແບ່ງອອກເປັນປ່ຽງການບັນເທົາທຸກ, ປ່ຽງຫຼຸດຜ່ອນຄວາມກົດດັນ, ປ່ຽງລໍາດັບແລະ relays ຄວາມກົດດັນ.
(1) ປ່ຽງບັນເທົາ
ປ່ຽງ overflow ຮັກສາຄວາມກົດດັນຄົງທີ່ໃນລະບົບຄວບຄຸມຫຼືວົງຈອນໂດຍຜ່ານການ overflow ຂອງພອດວາວ, ດັ່ງນັ້ນການບັນລຸຫນ້າທີ່ຂອງສະຖຽນລະພາບຄວາມກົດດັນ, ລະບຽບການຄວາມກົດດັນຫຼືການຈໍາກັດຄວາມກົດດັນ. ອີງຕາມຫຼັກການໂຄງສ້າງຂອງມັນ, ມັນສາມາດແບ່ງອອກເປັນສອງປະເພດ: ປະເພດການປະຕິບັດໂດຍກົງແລະປະເພດນັກບິນ.
(2) ວາວຄວບຄຸມຄວາມກົດດັນ
ປ່ຽງການຫຼຸດຜ່ອນຄວາມກົດດັນສາມາດຖືກນໍາໃຊ້ເພື່ອຫຼຸດຜ່ອນແລະສະຖຽນລະພາບຄວາມກົດດັນ, ຫຼຸດຜ່ອນຄວາມກົດດັນຂອງນ້ໍາມັນ inlet ສູງຂຶ້ນໄປສູ່ຄວາມກົດດັນນ້ໍາ outlet ຕ່ໍາແລະຫມັ້ນຄົງ.
ຫຼັກການການເຮັດວຽກຂອງວາວຫຼຸດຜ່ອນຄວາມກົດດັນແມ່ນອີງໃສ່ນ້ໍາມັນຄວາມກົດດັນເພື່ອຫຼຸດຜ່ອນຄວາມກົດດັນຜ່ານຊ່ອງຫວ່າງ (ຄວາມຕ້ານທານຂອງແຫຼວ), ດັ່ງນັ້ນຄວາມກົດດັນຂອງທໍ່ອອກແມ່ນຕ່ໍາກວ່າຄວາມກົດດັນຂອງ inlet, ແລະຄວາມກົດດັນຂອງ outlet ໄດ້ຖືກຮັກສາໄວ້ຢູ່ໃນມູນຄ່າທີ່ແນ່ນອນ. ຊ່ອງຫວ່າງນ້ອຍລົງ, ການສູນເສຍຄວາມກົດດັນຫຼາຍຂື້ນ, ແລະຜົນກະທົບຂອງການຫຼຸດຜ່ອນຄວາມກົດດັນທີ່ແຂງແຮງ.
ຫຼັກການໂຄງສ້າງແລະສັນຍາລັກຂອງປ່ຽງຫຼຸດຜ່ອນຄວາມກົດດັນທີ່ດໍາເນີນການທົດລອງ. ນ້ ຳ ມັນແຮງດັນທີ່ມີຄວາມກົດດັນຂອງ p1 ໄຫຼອອກຈາກທໍ່ນ້ ຳ ມັນ A ຂອງປ່ຽງ. ຫຼັງຈາກ decompression ຜ່ານຊ່ອງຫວ່າງ δ, ຄວາມກົດດັນຫຼຸດລົງເຖິງ p2, ແລະຫຼັງຈາກນັ້ນໄຫຼອອກຈາກປ່ຽງນ້ໍາມັນ B. ເມື່ອຄວາມກົດດັນຂອງປ່ຽງນ້ໍາມັນ p2 ຫຼາຍກ່ວາຄວາມກົດດັນການປັບ, ປ່ຽງ poppet ໄດ້ຖືກ pushed ເປີດ, ແລະສ່ວນຫນຶ່ງຂອງຄວາມກົດດັນໃນ. ຫ້ອງການນ້ໍາມັນຢູ່ປາຍຂວາຂອງປ່ຽງສະໄລ້ຕົ້ນຕໍໄຫຼເຂົ້າໄປໃນຖັງນ້ໍາມັນໂດຍຜ່ານການເປີດປ່ຽງ poppet ແລະຮູ Y ຂອງຮູລະບາຍນ້ໍາ. ເນື່ອງຈາກຜົນກະທົບຂອງຮູຂຸມຂົນນ້ອຍ R ພາຍໃນແກນວາວສະໄລ້ຫຼັກ, ຄວາມກົດດັນນ້ໍາມັນຢູ່ໃນຫ້ອງນ້ໍາຢູ່ປາຍຂວາຂອງວາວເລື່ອນຫຼຸດລົງ, ແລະແກນວາວສູນເສຍຄວາມສົມດູນແລະຍ້າຍໄປທາງຂວາ. ດັ່ງນັ້ນ, ຊ່ອງຫວ່າງ δ ຫຼຸດລົງ, ຜົນກະທົບ decompression ເພີ່ມຂຶ້ນ, ແລະຄວາມກົດດັນ outlet p2 ຫຼຸດລົງ. ກັບຄ່າປັບ. ຄ່ານີ້ຍັງສາມາດປັບໄດ້ໂດຍຜ່ານສະກູປັບຄວາມກົດດັນເທິງ.
ປ່ຽງຫຼຸດຜ່ອນຄວາມກົດດັນທີ່ສະແດງໂດຍກົງ
(3) ວາວຄວບຄຸມການໄຫຼ
ປ່ຽງໄຫຼຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການໄຫຼຂອງຂອງແຫຼວໃນລະບົບໄຮໂດຼລິກເພື່ອບັນລຸການຄວບຄຸມຄວາມໄວຂອງລະບົບໄຮໂດຼລິກ. ປ່ຽງໄຫຼທີ່ໃຊ້ທົ່ວໄປປະກອບມີປ່ຽງ throttle ແລະປ່ຽງຄວບຄຸມຄວາມໄວ.
ວາວໄຫຼເປັນອົງປະກອບຄວບຄຸມຄວາມໄວໃນລະບົບໄຮໂດຼລິກ. ຫຼັກການຄວບຄຸມຄວາມໄວຂອງມັນອີງໃສ່ການປ່ຽນແປງຂະຫນາດຂອງພື້ນທີ່ໄຫຼຂອງພອດວາວຫຼືຄວາມຍາວຂອງຊ່ອງທາງການໄຫຼເພື່ອປ່ຽນຄວາມຕ້ານທານຂອງແຫຼວ, ຄວບຄຸມການໄຫຼຜ່ານປ່ຽງ, ແລະປັບຕົວກະຕຸ້ນ (ກະບອກສູບຫຼືມໍເຕີ). ) ຈຸດປະສົງຂອງຄວາມໄວການເຄື່ອນໄຫວ.
1) ປ່ຽງ throttle
ຮູບຮ່າງຂອງປ່ຽງປ່ຽງປ່ຽງທົ່ວໄປທີ່ໃຊ້ທົ່ວໄປແມ່ນດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ, ລວມທັງປະເພດປ່ຽງເຂັມ, ປະເພດ eccentric, ປະເພດຮ່ອງຕາມແກນ, ແລະອື່ນໆ.
ປ່ຽງ throttle ທໍາມະດາຮັບຮອງເອົາການເປີດ throttle ປະເພດ groove axial. ໃນລະຫວ່າງການປະຕິບັດງານ, ແກນວາວແມ່ນຄວາມກົດດັນເທົ່າທຽມກັນ, ມີຄວາມຫມັ້ນຄົງຂອງການໄຫຼທີ່ດີແລະບໍ່ງ່າຍທີ່ຈະຖືກສະກັດ. ນ້ຳມັນແຮງດັນໄຫຼເຂົ້າຈາກຮູປ້ຳນ້ຳມັນ p1, ເຂົ້າສູ່ຮູ A ຜ່ານຮູ b ແລະ ຮ່ອງລະບາຍນ້ຳຢູ່ປາຍຊ້າຍຂອງຫຼັກປ່ຽງ 1, ແລ້ວໄຫຼອອກຈາກປ້ຳນ້ຳມັນ p2. ໃນເວລາທີ່ການປັບອັດຕາການໄຫຼ, rotate nut regulating ຄວາມກົດດັນ 3 ເພື່ອຍ້າຍ rod ຍູ້ 2 ຕາມທິດທາງແກນ. ໃນເວລາທີ່ rod ຍູ້ຍ້າຍໄປທາງຊ້າຍ, ແກນວາວຍ້າຍໄປທາງຂວາພາຍໃຕ້ການປະຕິບັດຂອງຜົນບັງຄັບໃຊ້ພາກຮຽນ spring ໄດ້. ໃນເວລານີ້, ຊ່ອງທາງເປີດກວ້າງແລະອັດຕາການໄຫຼເພີ່ມຂຶ້ນ. ເມື່ອນໍ້າມັນຜ່ານປ່ຽງ throttle, ຈະມີການສູນເສຍຄວາມກົດດັນ △p=p1-p2, ເຊິ່ງຈະມີການປ່ຽນແປງກັບການໂຫຼດ, ເຮັດໃຫ້ເກີດການປ່ຽນແປງຂອງອັດຕາການໄຫຼຜ່ານພອດ throttle ແລະຜົນກະທົບຕໍ່ຄວາມໄວໃນການຄວບຄຸມ. ປ່ຽງ throttle ມັກຖືກນໍາໃຊ້ໃນລະບົບໄຮໂດຼລິກທີ່ການໂຫຼດແລະການປ່ຽນແປງອຸນຫະພູມແມ່ນຂະຫນາດນ້ອຍຫຼືຄວາມຕ້ອງການຄວາມຫມັ້ນຄົງຂອງຄວາມໄວແມ່ນຕໍ່າ.
2) ປ່ຽງຄວບຄຸມຄວາມໄວ
ປ່ຽງຄວບຄຸມຄວາມໄວແມ່ນປະກອບດ້ວຍປ່ຽງຫຼຸດລົງຄວາມກົດດັນທີ່ຄົງທີ່ແລະປ່ຽງ throttle ເຊື່ອມຕໍ່ເປັນຊຸດ. ປ່ຽງຫຼຸດລົງຄວາມກົດດັນທີ່ຄົງທີ່ອັດຕະໂນມັດສາມາດຮັກສາຄວາມແຕກຕ່າງກັນຂອງຄວາມກົດດັນກ່ອນແລະຫຼັງຈາກປ່ຽງ throttle ບໍ່ປ່ຽນແປງ, ດັ່ງນັ້ນຄວາມແຕກຕ່າງຂອງຄວາມກົດດັນກ່ອນແລະຫຼັງປ່ຽງ throttle ບໍ່ໄດ້ຮັບຜົນກະທົບຈາກການໂຫຼດ, ດັ່ງນັ້ນການຜ່ານປ່ຽງ throttle ອັດຕາການໄຫຼແມ່ນຄົງທີ່ໂດຍພື້ນຖານແລ້ວ. ຄ່າ.
ປ່ຽງຫຼຸດຜ່ອນຄວາມກົດດັນ 1 ແລະປ່ຽງ throttle 2 ແມ່ນເຊື່ອມຕໍ່ເປັນຊຸດລະຫວ່າງປັ໊ມໄຮໂດຼລິກແລະກະບອກໄຮໂດຼລິກ. ນ້ໍາມັນແຮງດັນຈາກປັ໊ມໄຮໂດຼລິກ (ຄວາມກົດດັນແມ່ນ pp), ຫຼັງຈາກທີ່ຖືກ decompressed ຜ່ານຊ່ອງຫວ່າງເປີດຢູ່ທີ່ຄວາມກົດດັນຫຼຸດລົງວາວ groove a, ໄຫຼເຂົ້າໄປໃນຮ່ອງ b, ແລະຄວາມກົດດັນຫຼຸດລົງເຖິງ p1. ຫຼັງຈາກນັ້ນ, ມັນໄຫຼເຂົ້າໄປໃນກະບອກໄຮໂດຼລິກໂດຍຜ່ານປ່ຽງ throttle, ແລະຄວາມກົດດັນຫຼຸດລົງເຖິງ p2. ພາຍໃຕ້ຄວາມກົດດັນນີ້, piston ຍ້າຍໄປເບື້ອງຂວາຕໍ່ກັບການໂຫຼດ F. ຖ້າການໂຫຼດບໍ່ຄົງທີ່, ເມື່ອ F ເພີ່ມຂຶ້ນ, p2 ຈະເພີ່ມຂຶ້ນ, ແລະແກນຂອງປ່ຽງຫຼຸດລົງຄວາມກົດດັນຈະສູນເສຍຄວາມສົມດູນແລະຍ້າຍໄປທາງຂວາ, ເຊິ່ງກໍ່ໃຫ້ເກີດຄວາມດັນ. ການເປີດຊ່ອງຫວ່າງຢູ່ທີ່ສະລັອດຕິງ a ເພື່ອເພີ່ມທະວີການ, ຜົນກະທົບ decompression ຈະອ່ອນລົງ, ແລະ p1 ຍັງຈະເພີ່ມຂຶ້ນ. ດັ່ງນັ້ນ, ຄວາມແຕກຕ່າງຂອງຄວາມກົດດັນ Δp = pl-p2 ຍັງບໍ່ປ່ຽນແປງ, ແລະອັດຕາການໄຫຼເຂົ້າທໍ່ໄຮໂດຼລິກຜ່ານປ່ຽງ throttle ຍັງບໍ່ປ່ຽນແປງ. ໃນທາງກົງກັນຂ້າມ, ເມື່ອ F ຫຼຸດລົງ, p2 ຍັງຫຼຸດລົງ, ແລະແກນວາວຂອງປ່ຽງຫຼຸດຜ່ອນຄວາມກົດດັນຈະສູນເສຍຄວາມສົມດູນແລະຍ້າຍໄປທາງຊ້າຍ, ດັ່ງນັ້ນຊ່ອງຫວ່າງເປີດຢູ່ຊ່ອງສຽບຫຼຸດລົງ, ຜົນກະທົບຂອງການບີບອັດໄດ້ຖືກປັບປຸງ, ແລະ p1 ຍັງຫຼຸດລົງ. , ດັ່ງນັ້ນຄວາມແຕກຕ່າງຂອງຄວາມກົດດັນ △p = p1-p2 ຍັງບໍ່ປ່ຽນແປງ, ແລະອັດຕາການໄຫຼເຂົ້າກະບອກໄຮໂດຼລິກຜ່ານປ່ຽງ throttle ຍັງບໍ່ປ່ຽນແປງ.